CINÉMATIQUE DU SOLIDE
 Définitions
Définitions
1. Référentiel: espace, temps:
2. Changement de référentiels. repères d'espace:3. Point mobile par rapport à un référentiel:
a) Trajectoire.
b) Vecteur vitesse de M par rapport à R0
c) Vecteur accélération de M par rapport à R0
d) Remarque importante
L'étude du mouvement ne peut se faire qu'en précisant par rapport à quoi à lieu ce mouvement. Le temps permet de repérer les positions différentes.
On associe au système de référence un repère. Ce repère est caractérisé par un trièdre orthonormée direct.
Un point matériel est dit en mouvement par rapport à un repère
R0 si au moins une de ses coordonnées dans R0 varie avec le temps.Un solide est dit en mouvement par rapport à un repère
R0 si au moins un de ses points est en mouvement par rapport à R0.Point mobile par rapport à un référentie
On appelle point matériel ou corps ponctuel tout corps ou toute partie de corps très petit à l'échelle d'observation.
C'est également un corps dont on ne peut définir le mouvement de rotation sur lui même.
On appelle trajectoire de M par rapport
R0 (M/R0) l'ensemble des positions successives de M par rapport à R0 quand le temps t varie. La trajectoire est un courbe liée à R0.La trajectoire dépend du repère
R0 dans lequel elle est décrite.Pour pouvoir caractériser complètement le mouvement de M/R0 il faut pouvoir préciser la position du mobile à un instant donné quelconque.
Pour cela il suffit pour décrire la trajectoire d'utiliser un paramètre fonction du temps. Le mouvement de M/R0 est connu si on connaît
ou x(t), y(t), z(t) décrivent les lois du mouvement et sont deux fois continûment dérivable.
avec O origine du repère R0 .Le vecteur vitesse est tangent en M à la trajectoire.
EXERCICES
CINÉMATIQUE GRAPHIQUE
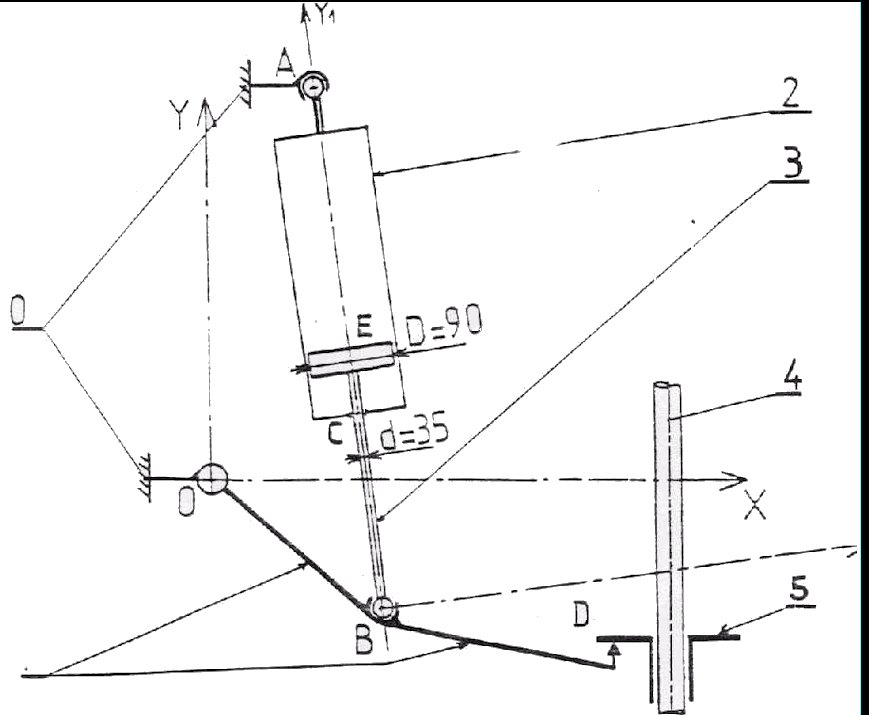
Étude d'un vérin de relevage.
1) Description du mécanisme.
Un vérin ( corps 2 et tige 3 ) assure par l'intermédiaire d'un levier 1 articulé en 0 par rapport au bâti 0,
le relevage d'une bague 5 coulissant le long de l'arbre 4 comme l'indique le schéma ci-dessus
2. Hypothèses et données
- Le mécanisme est supposé plan et 1'étude est faite dans le plan de symétrie géométrique et mécanique, le plan ( X, O,Y): x et y sont des vecteurs unitaires des axes OX et OY).
- L'étude est faite dans la position de la figure .
- L'axe 4 n'a aucun mouvement par rapport à 0.
- On désire un relevage de la bague 5 par rapport à l'axe 4 à la vitesse de 0.5m/s.
- L'échelle des vitesses pour les constructions est: 10daN pour 0.5m/s .
3. Travail demandé:
3.1. A partir du schéma figure , identifier les liaisons suivantes: L 1/0. L2/0. L3/1, L4/5 , et L1/5.
Pour toutes les questions suivantes l'étude est faite dans le plan de symétrie (voir hypothèses)
3.2. Quelle est la nature du mouvement de 1/0?
Tracer les trajectoires des points B et D, soient TB1/0 et TD1/0.
En déduire les directions des vecteurs vitesse
B1/0 et
D1/0. Les tracer, Représenter
D1/0.
3.3. Quelle est la nature du mouvement de 5/4?
Tracer la trajectoire TD5/4 puis la direction de ![]() D5/4.
D5/4.
3.4. Déterminer
puis tracer la direction de ![]() D1/5.
D1/5.
3 4. Écrire
une relation entre![]() D1/0,
D1/0,![]() D1/5 et
D1/5 et
![]() D5/0.
D5/0.
3.6. Déterminer
graphiquement ![]() D1/5 et
D1/5 et ![]() D1/0.
D1/0.
3.7. Par
la méthode de votre choix, déterminer et tracer ![]() B1/0.
B1/0.
3.8. Quelle est la nature du mouvement de 3/2?
Tracer la trajectoire
TB3/2 puis la direction de ![]() B3/2
B3/2
3.9. Quelle est la nature du mouvement de 2/0?
Tracer la trajectoire
TB2/0 puis la direction de ![]() B2/0.
B2/0.![]()
3. 10.
Écrire une relation entre ![]() B1/0,
B1/0,![]() B1/3,
B1/3,![]() B3/2, et
B3/2, et
![]() B2/0.
B2/0.
3.11.
Déterminer graphiquement ![]() B3/2.
B3/2.
3.12. En déduire le débit instantané d'huile nécessaire pour assurer le relevage de la bague 5 à la vitesse désirée.
Exprimer ce débit en m3/s puis en l/min.
Envoyez un courrier électronique à qaidi@caramail.com pour toute question ou remarque concernant ce site Web.
Dernière modification : 06 février 2001